PID 控制矩阵如何工作?

Written by Paul Cracknell
Updated at April 7th, 2025
控制矩阵将输入信号组合、重新调整和重新分配到两个独立的 PID 控制器、FIR 滤波器或数字滤波器。输出向量是控制矩阵与输入向量的乘积。

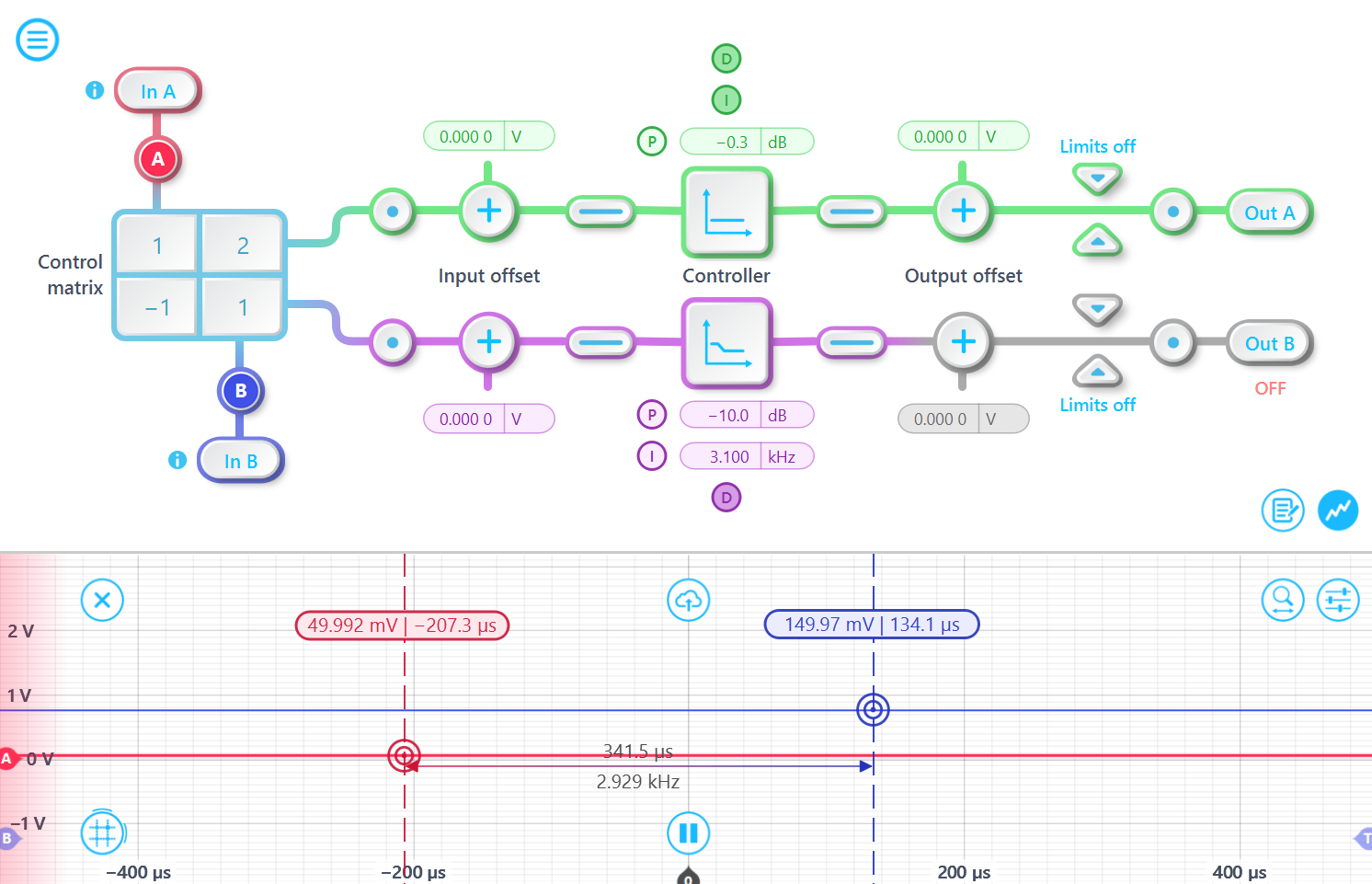
例如,在这种配置中,两个输入是 50 mV 和 150 mV 的直流信号。
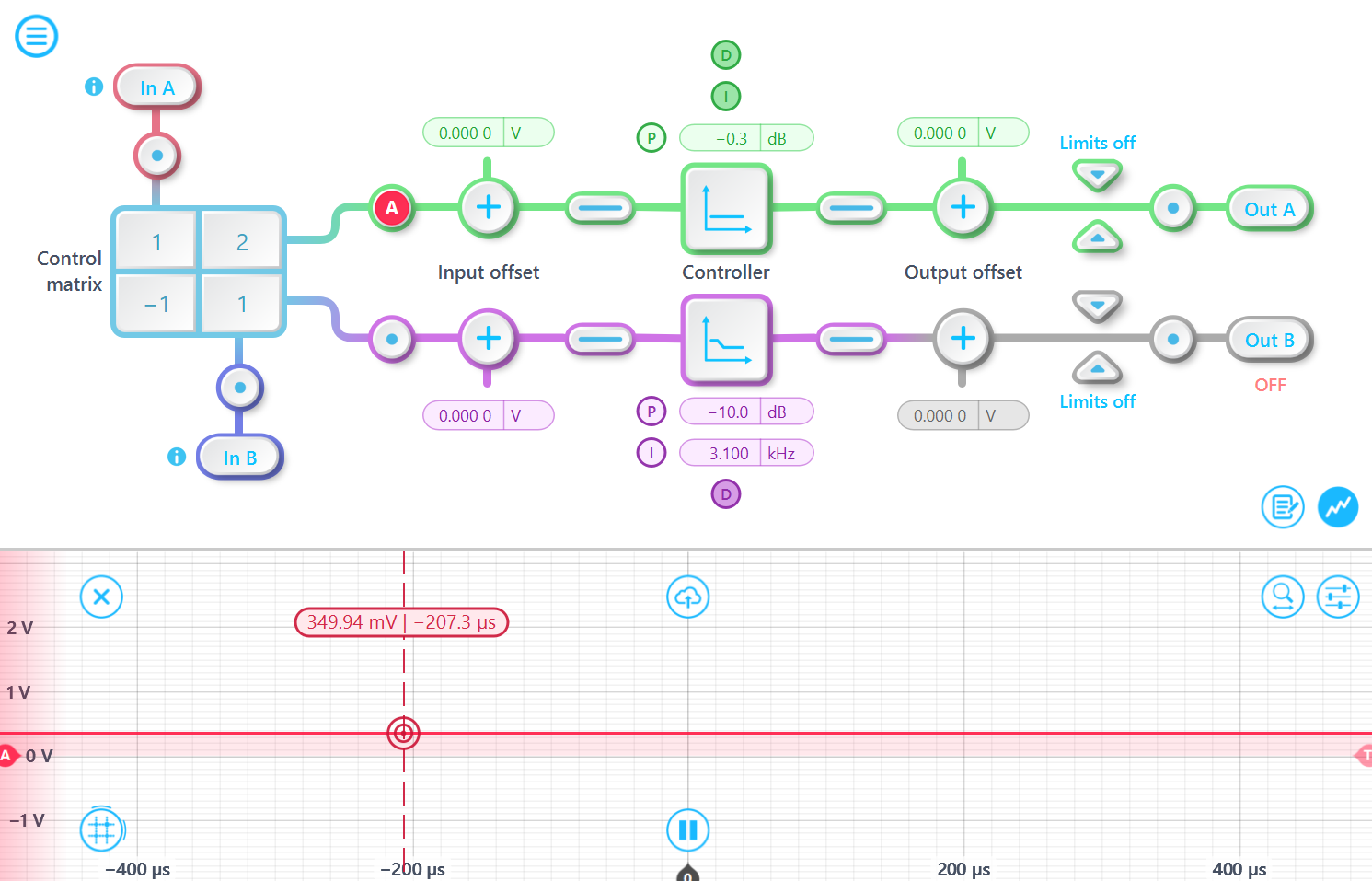
由于控制矩阵的第一行是[1, 2],因此控制矩阵的通道A输出计算为1×InA+2×InB=350mV。
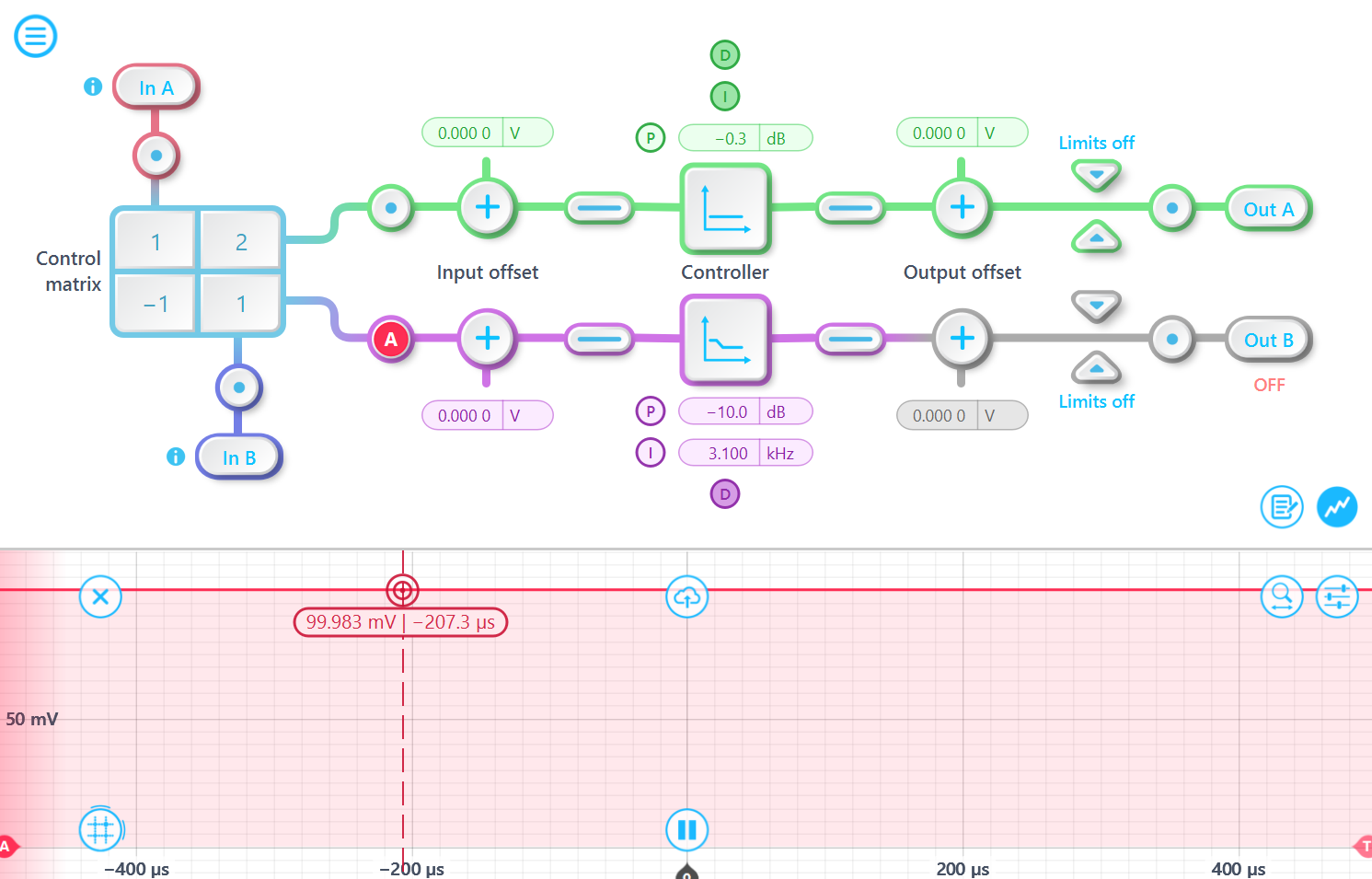
控制矩阵的第二行是[-1, 1],所以控制矩阵的ChannelB输出计算为-1 × InA + 1 × InB = 100 mV。