如何调整输入增益或反转 PID 输入?

Written by Paul Cracknell
Updated at April 7th, 2025
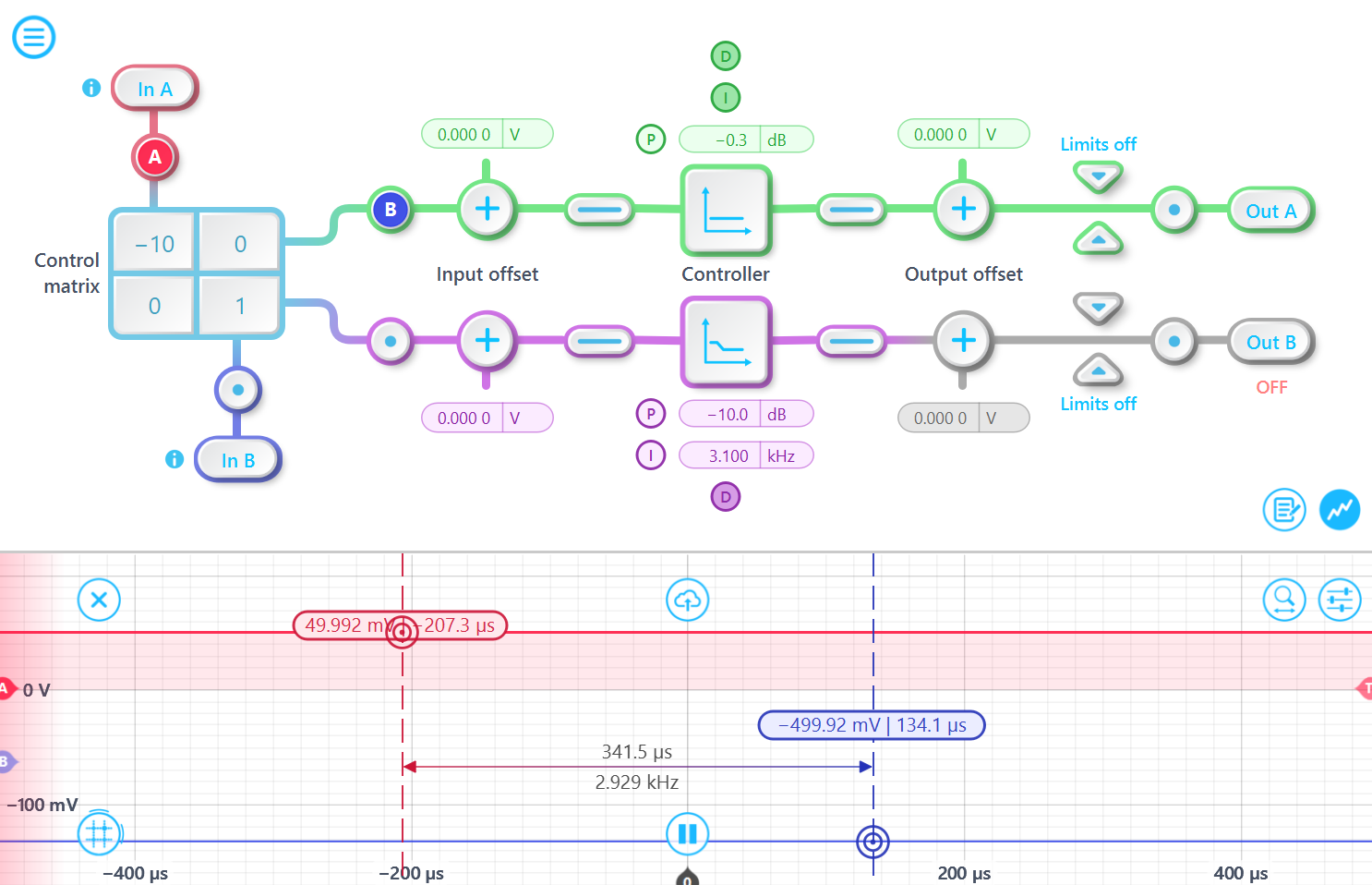
控制矩阵可用于将输入乘以 -20 到 20 之间的因子,增量为 0.1(-10, 10),或 1 [-20, 10]∪[10, 20]。这可有效用于应用输入增益或反转输入。
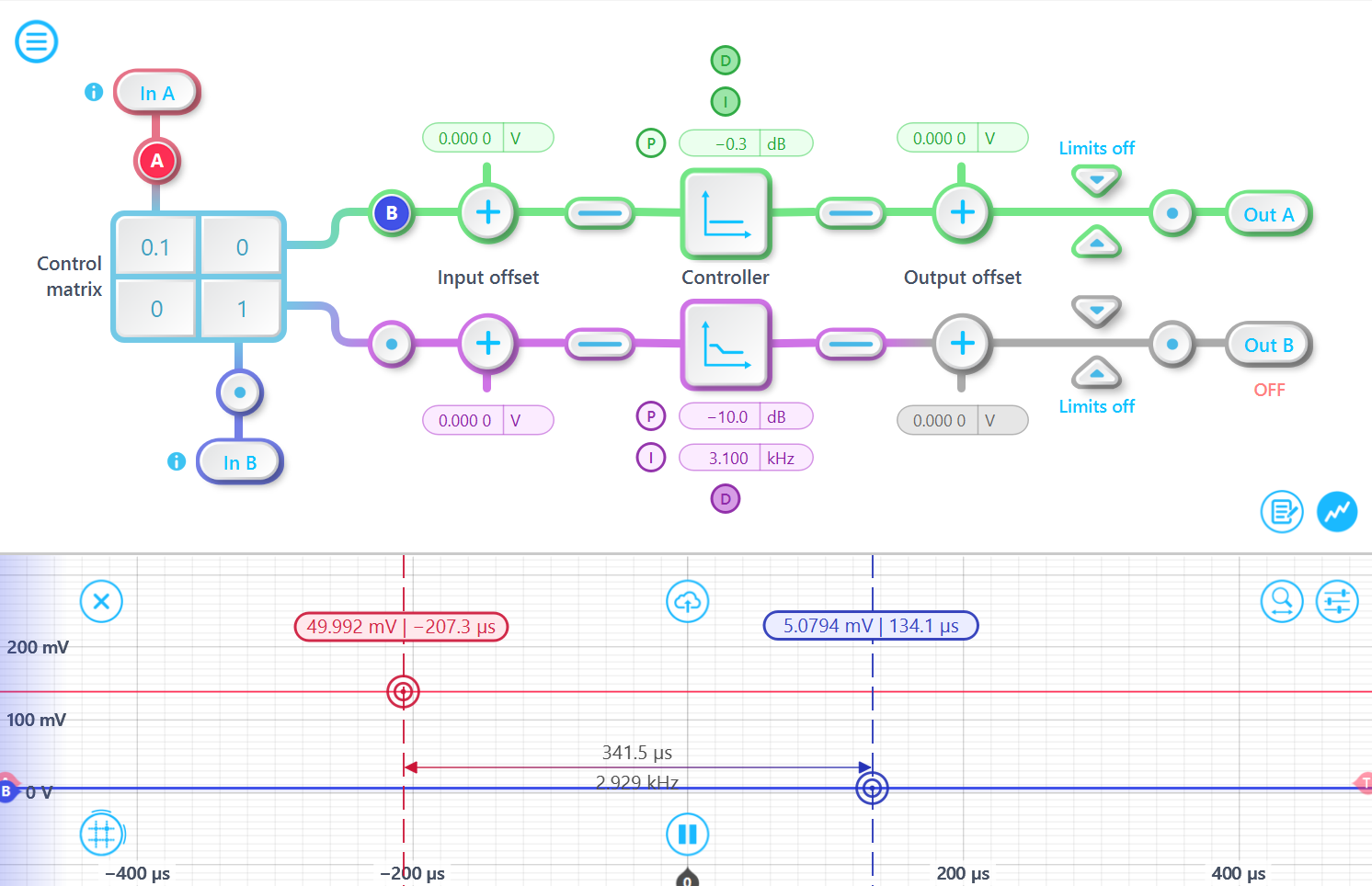
例如,可以通过将控制矩阵中的第一个元素设置为 0.1 来缩小信号。结果,49.992 mV 的输入信号被控制矩阵降低到 5.0794 mV。
此外,通过将控制矩阵设置为 -10,可以将信号反转并缩放至 -499.992 mV。