PID 制御マトリックスはどのように機能しますか?

Written by Paul Cracknell
Updated at April 9th, 2025
- Moku:Lab
- Moku:Go
-
Moku:Pro
Moku:Proに関するよくある質問 Moku:Pro波形発生器 Moku:Proタイム&周波数アナライザ Moku:Proロジックアナライザ/パターンジェネレーター Moku:Proレレーザーロックボックス Moku:Proロックインアンプ Moku:Proスペクトラムアナライザ Moku:Proデータロガー Moku:Pro任意波形発生器 Moku:Proマルチ機器モード Moku:Pro位相計 Moku:Pro FIRフィルタービルダー Moku:Pro PIDコントローラー Moku:Proオシロスコープ Moku:Pro周波数応答アナライザ Moku:Proデジタルフィルターボックス
- Python API
- MATLAB API
- 任意波形発生器
- データロガー
- デジタルフィルターボックス
- FIR フィルタ ビルダー
- 周波数応答アナライザー
- レーザーロックボックス
- ロックインアンプ
- オシロスコープ
- 位相計
- PIDコントローラー
- スペクトラムアナライザー
- 時間と周波数アナライザー
- 波形発生器
- ロジックアナライザ/パターンジェネレーター
- マルチ機器モード
- Mokuクラウドコンパイル
- Mokuに関するよくある質問
- LabVIEW API
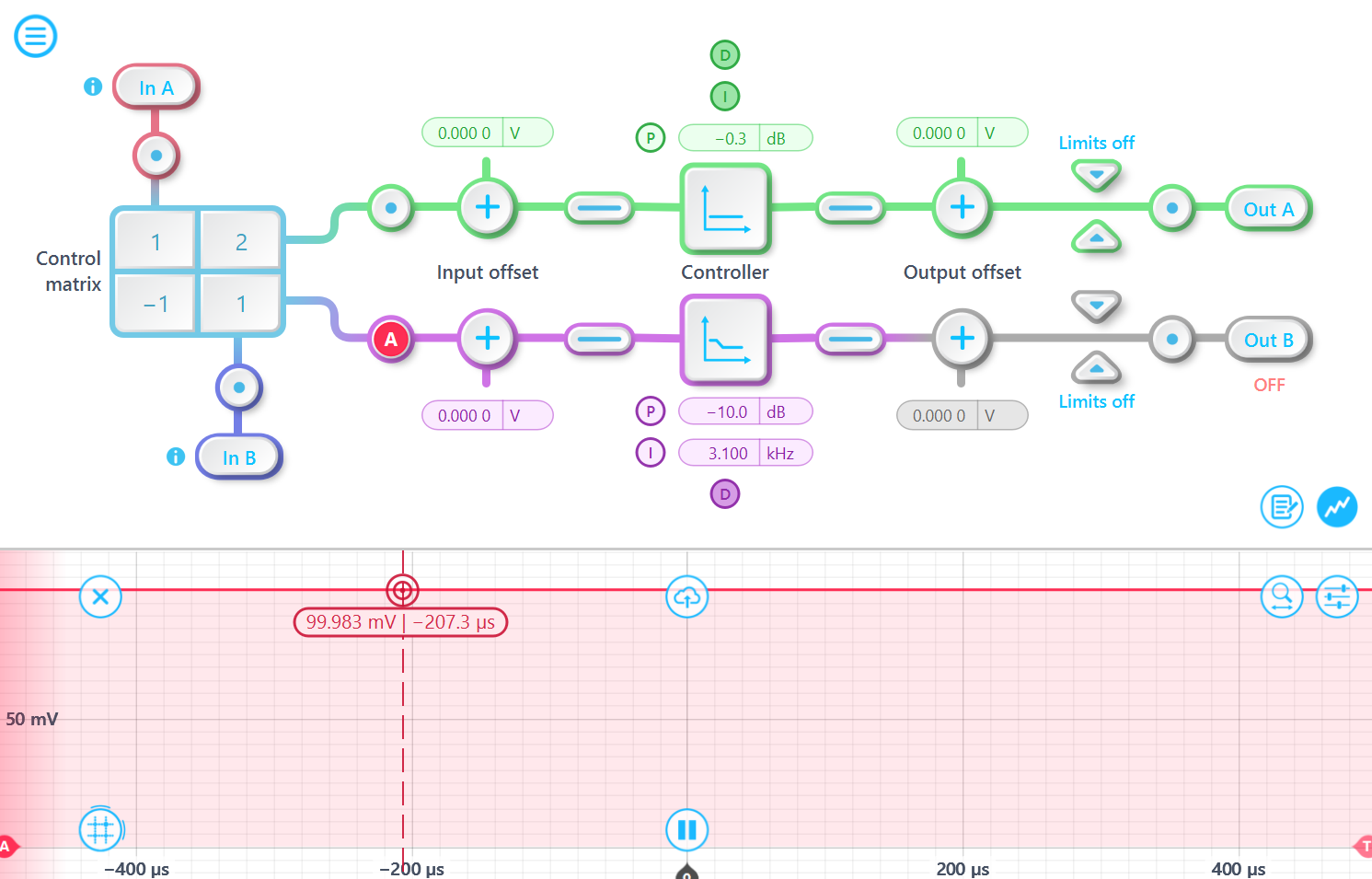
制御マトリックスは、入力信号を 2 つの独立した PID コントローラー、FIR フィルター、またはデジタル フィルターに結合、再スケール、再分配します。出力ベクトルは、制御マトリックスと入力ベクトルの積です。

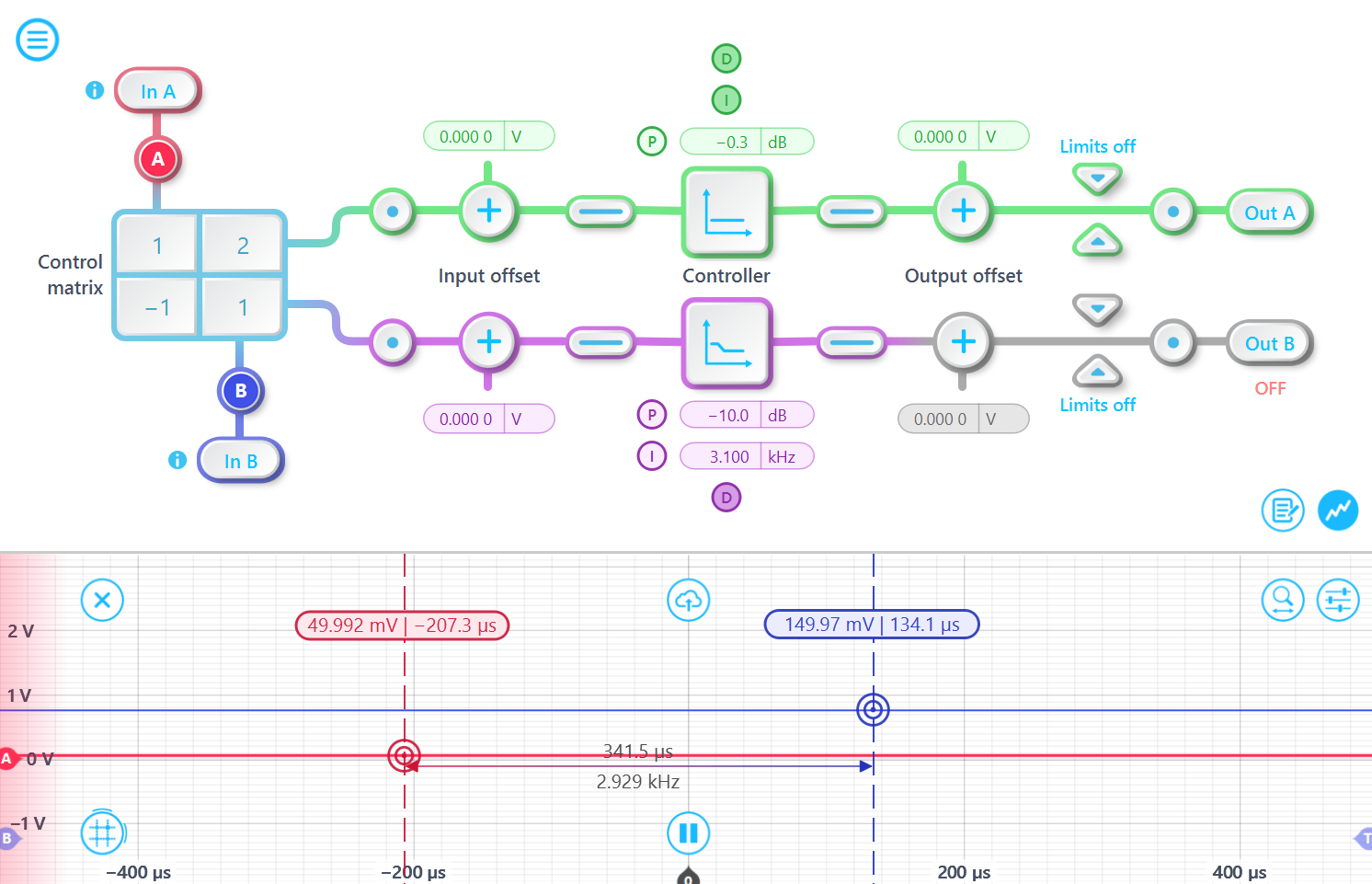
たとえば、この構成では、2 つの入力は 50 mV と 150 mV の DC 信号です。
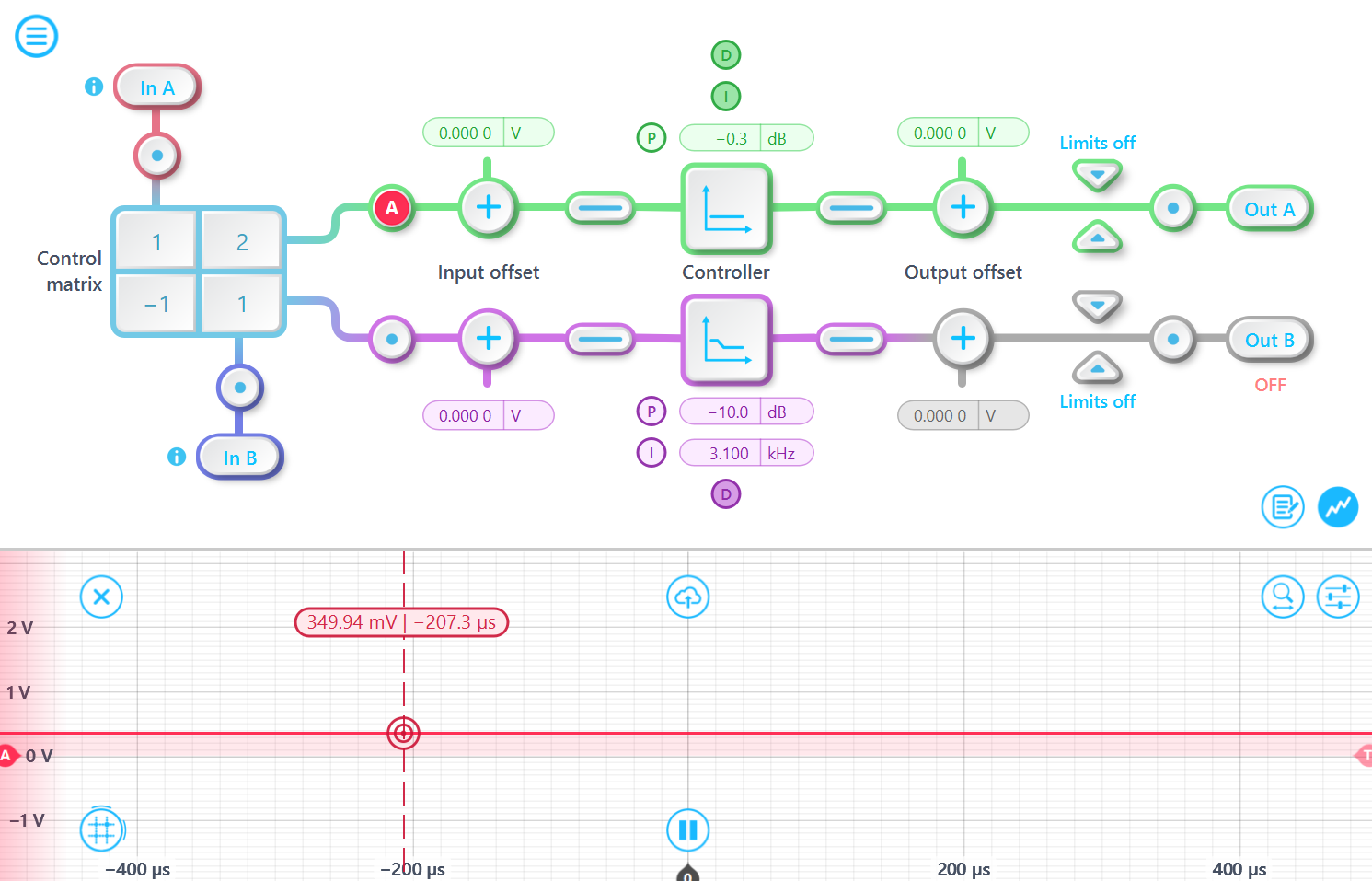
制御マトリックスの最初の行は[1, 2]なので、制御マトリックスのChannelA出力は1×InA + 2×InB = 350 mVと計算されます。
制御マトリックスの2行目は[-1, 1]なので、制御マトリックスのChannelB出力は-1 × InA + 1 × InB = 100 mVと計算されます。