PID コントローラーの設定点をどのように調整しますか?

Written by Paul Cracknell
Updated at April 9th, 2025
- Moku:Lab
- Moku:Go
-
Moku:Pro
Moku:Proに関するよくある質問 Moku:Pro波形発生器 Moku:Proタイム&周波数アナライザ Moku:Proロジックアナライザ/パターンジェネレーター Moku:Proレレーザーロックボックス Moku:Proロックインアンプ Moku:Proスペクトラムアナライザ Moku:Proデータロガー Moku:Pro任意波形発生器 Moku:Proマルチ機器モード Moku:Pro位相計 Moku:Pro FIRフィルタービルダー Moku:Pro PIDコントローラー Moku:Proオシロスコープ Moku:Pro周波数応答アナライザ Moku:Proデジタルフィルターボックス
- Python API
- MATLAB API
- 任意波形発生器
- データロガー
- デジタルフィルターボックス
- FIR フィルタ ビルダー
- 周波数応答アナライザー
- レーザーロックボックス
- ロックインアンプ
- オシロスコープ
- 位相計
- PIDコントローラー
- スペクトラムアナライザー
- 時間と周波数アナライザー
- 波形発生器
- ロジックアナライザ/パターンジェネレーター
- マルチ機器モード
- Mokuクラウドコンパイル
- Mokuに関するよくある質問
- LabVIEW API
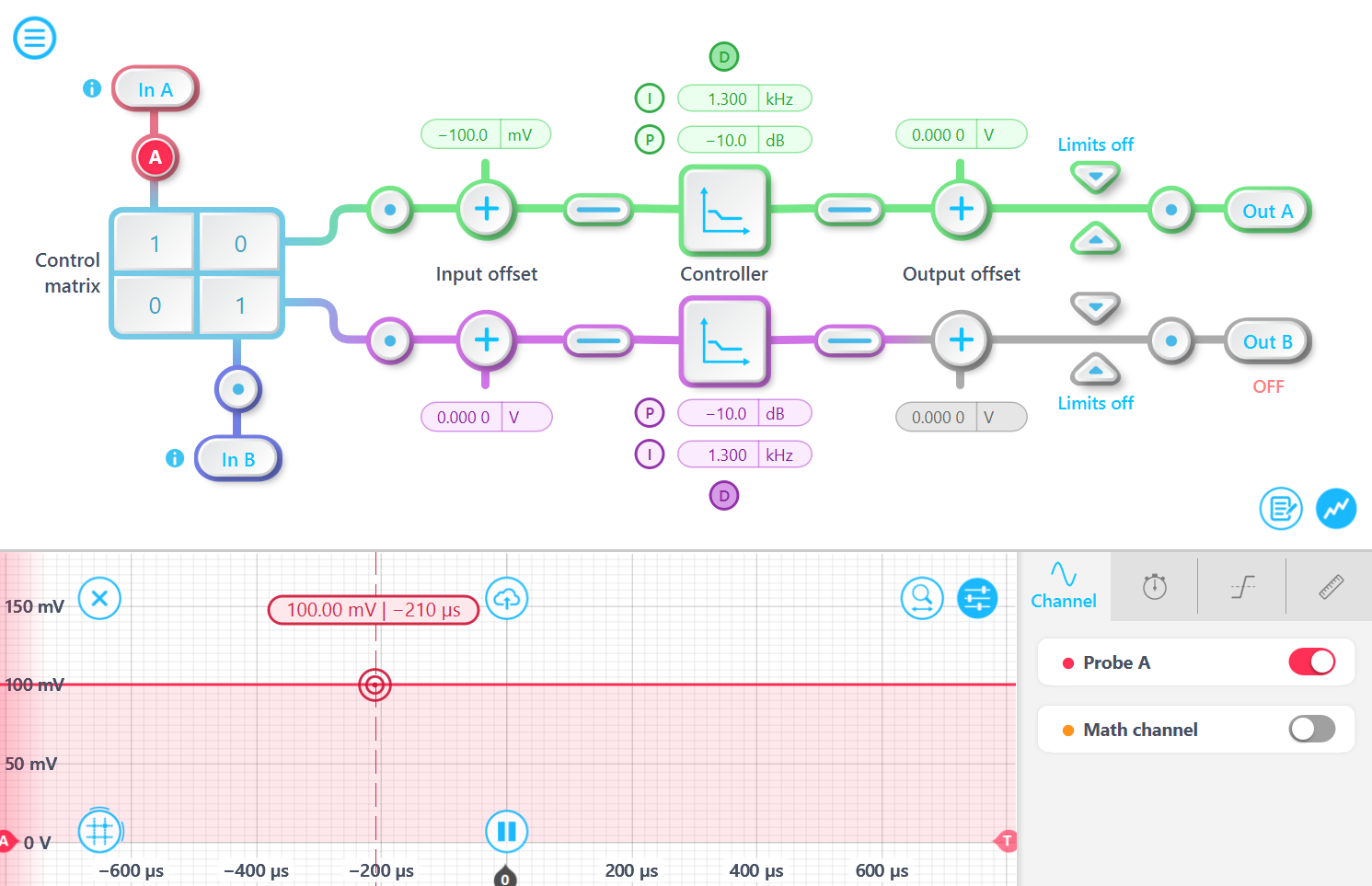
Moku PID コントローラーの設定点は入力オフセットによって制御されます。エラー信号は、ここでユーザーが入力した値によってオフセットされます。これにより、設定点は実質的に負の入力オフセットになります。
たとえば、入力信号レベルを 100 mV に制御するには、入力オフセットを -100 mV に設定する必要があります。その結果、InA が 100 mV に達すると、PID コントローラの入力信号は 0 になります。